
Overview:
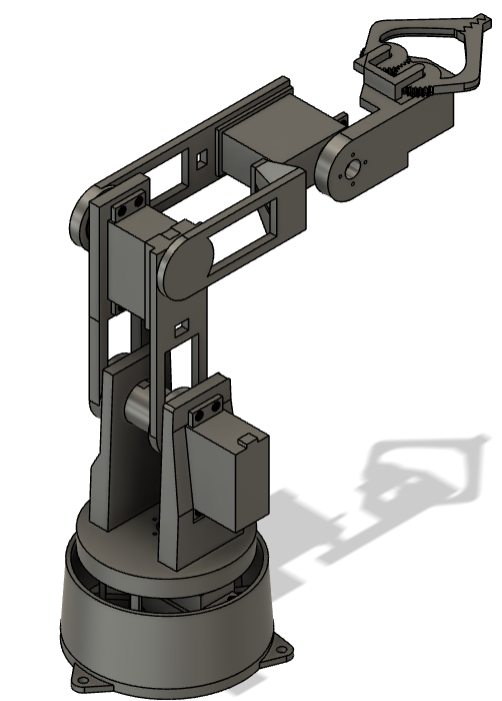
My endeavor has been to design and realize a robot arm manipulator endowed with five degrees of freedom. Tailored to perform pick and place tasks, the terminus of this arm is equipped with a proficient gripper.
Design and Fabrication:
Commencing with meticulous design on Fusion360, I segmented the robot into individual components, followed by their systematic assembly. An iterative approach was adopted—fabricating and trialing each joint successively. This strategy not only augmented my understanding of part design intricacies for fabrication but also enlightened me about the significance of material and equipment constraints. The entire assembly was 3D printed using PLA on my Ender 3 V2 printer, while I effectively employed available household hardware for the assembly process.
Testing and Insights:

Software Integration and Next Steps:
I have curated Arduino code receptive to the serial monitor's position directives for each servo. In tandem, a ROS2 node has been developed, capable of transmuting button and axis directives from a PS4 controller into precise servo commands. Post mastery over the PS4 controller's robot arm manipulation, I aim to leverage Gazebo within the Robot Operating System (ROS) to simulate the arm and conceptualize advanced controls. This will set the stage for the subsequent prototype iteration, which is envisioned to encompass position feedback capabilities.